Peripheral neuropathies, most commonly caused by physical trauma, affect approximately 20 million people in the United States. In many cases, they cause motor nerve damage, which results in muscle weakness that restricts motor tasks. However, electromyograms (EMG), which measure the electrical activity of a muscle, can still be acquired from weak muscles, as long as they show some degree of response to innervation.
This project aims to use patterns from EMG signals to control a FANUC robotic arm that replaces basic arm functions in patients with upper extremity neuropathies. In specific medical applications, a set of viable movements will be predetermined based on the patient’s abilities and allocated to control certain movements on the device. This human-machine interface would enable a person to perform useful every day tasks (eg. drinking from a cup).
This project aims to use patterns from EMG signals to control a FANUC robotic arm that replaces basic arm functions in patients with upper extremity neuropathies. In specific medical applications, a set of viable movements will be predetermined based on the patient’s abilities and allocated to control certain movements on the device. This human-machine interface would enable a person to perform useful every day tasks (eg. drinking from a cup).
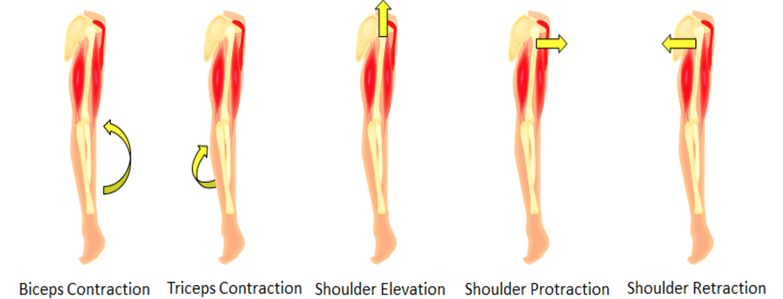
Chosen shoulder movements based on a person with a brachial plexus injury
The system is divided into three parts:
